BOSS COGNET
Bionic Observation and Survey System – Cognition and Network
| Duration: | 01.04.2013 - 31.03.2017 |
| Project Leader: | Prof. Dr.-Ing. Horst Hellbrück |
| Staff: | Dipl.-Ing. (FH) Gunther Ardelt, Dipl.-Ing. (FH) Tim Esemann, Dr.-Ing. Torsten Teubler |
Background

Fig.1: BOSS-System
The joint research project BOSS (Bionic Observation and Survey System) develops innovative underwater-vehicles shaped like bionic manta rays. The underwater vehicles are supposed to perform surveying and monitoring tasks in the open sea. The manta rays will be operated by remote control or act autonomous as a swarm. BOSS is conducted by Lübeck University of Applied Sciences in cooperation with two industry-partners, EvoLogics GmbH and Sea & Sun Technology GmbH. EvoLogics acts as project coordinator and develops the manta rays as bionic underwater vehicles. Sea & Sun Technology is responsible for the underwater sensor system. Lübeck University of Applied Sciences develops maritime information and communication solutions in the subproject COGNET (Cognition and Network).
Objective
COGNET creates a dynamic mobile underwater-intranet based on heterogeneous flexible ad-hoc-networks with telemetric connectivity, which is also integrated in the internet. The autonomous manta rays get equipped with purpose-built sensor modules and interfaces for multimedia-based communication and navigation. First the mantas’ intelligent, cognitive and auto-adaptive properties will be implemented as well as methods for the interoperable system integration of communication and navigation. Capabilities to act cooperatively and self-organized inside a swarm will be added successively. To achieve these goals, a rule-base expert system is implemented and gradually extended. Existing wireless sensor testbeds and correspondent expert knowledge regarding the composition of simulations and testbeds is utilized in practical tests and optimization.
Approach
In COGNET, a dynamic mobile underwater intranet is created, based on heterogeneous flexible ad hoc networking with telemetry connectivity. The UW intranet will be integrated into the Internet. As a core innovation, the autonomous manta rays will be equipped with special sensor modules as well as multimedia networkable communication and navigation interfaces. In an extensive experimental program, intelligent cognitive and auto-adaptive features of the mantas will be developed and techniques of interoperable system networking for communication and navigation will be tested. Successively, capabilities for cooperative behavior and self-organization in the swarm will be developed. To achieve these goals, a rule-based expert system will be implemented and gradually extended by means of algorithm design and simulation. For practical tests and optimization, existing wireless sensor testbeds and experience gained so far in building simulators and testbeds will be used.
Results
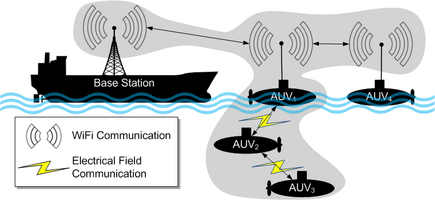
Fig.2: Schematic mesh network
Networking
One of the main goals of the project is to network the vehicles and the vehicle components with each other. In terms of networking, these goals have been achieved.
The vehicles can communicate with each other and with the infrastructure via WLAN. The WLAN network is not a "classic" WLAN with stations and access points, but a so-called "mesh network". A mesh network enables communication via intermediate stations if, for example, communication partners are not within direct radio range.
We have also extended the mesh network to underwater communication via the electric field. This allows communication partners to be underwater and communicate with intermediate stations located above water. Figure 2 visualizes a mesh network schematically. The base station can communicate with AUV4 via WLAN through AUV1. AUV2 and AUV3 can also be reached via AUV1, although communication via the electric field is used here.
In order to test the networking itself and the distributed algorithms, a so-called testbed was set up, which contains some of the networked electronic components of four vehicles. In the testbed, the integration of sensors into the internal vehicle infrastructure as well as long-term tests of sensors and programs are performed. Figure 3 shows the testbed schematically, with components AUV1 shown in detail. AUV2 through AUV4 are indicated in the upper right. The testbed maintenance computer (Testbed Maintenance Computer) enables the developers to access the components via the "maintenance bus" (Maintenance Bus) if they are temporarily inaccessible via the network, e.g. because the configuration has changed.
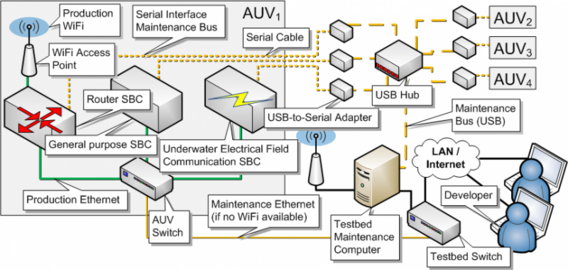
Fig.3: Schematic test bed
Sensors
Furthermore, we deal with sensor technology in general. For example, a mark extraction from sonar images was implemented as part of a student research project. The figures below (Fig.4-7) show the intermediate stages of the mark extraction. An image is generated from the raw sonar data (Fig.4). By applying smoothing filters and edge detection, a dominant contour is extracted step by step (Fig.5-6). Then equidistant coordinates are distributed on the contour (Blue pointsin Fig.7) and the contour is closed at start point (green point in Fig.7) and end point (red point in Fig.7). These coordinates serve as discrete input for further machine processing. Based on the coordinates, the size of the detected contour can be estimated, for example.
Fig.4: Intermediate 1 - Image from raw sonar data

Fig.5: Intermediate 2 - Application of smoothing filters and edge detectionn

Fig.6: Intermediate 3 - Application of smoothing filters and edge detection
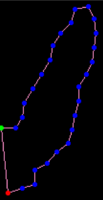
Fig.7: Intermediate 4 - Coordinate distribution on contour
Underwater Communication
To implement and evaluate our various underwater communications, we have developed a modular system. Our modular architecture allows us to use different communication media and provides high reusability of software modules. An overview of our architecture is shown below.
Currently, we are working on three communication methods: Optical communication for very low ranges (< 1 m) with very high data rates, electrical field communication for low ranges (< 15 m) with high data rates, and an acoustic communication for medium ranges (< 100 m) with medium data rates.
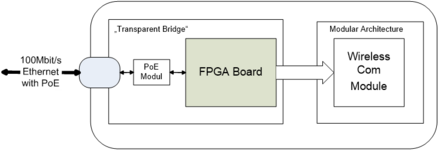
Fig.8: Overview modular architecture
Electric Field Communication
Since conventional radio signals, such as WLAN, are very strongly attenuated under water, we have chosen a novel approach here. With this approach, we are able to transmit data over several meters at high data rates. Tests in the swimming pool have shown that it is possible to stream a video with a data rate of 250 kbit/s over a distance of more than 8 m with our approach.
| Data Rate | 250 kbit/s (an increase up to 2Mbit/s is in progress) |
| Range | 8 m (an extension up to 15m is in work) |
Power Consumption | 30W (Broadcasting Operation) |
| Dimension | 310x115x60 mm |

Fig.9: Swimming Pool Test
Optical Communication
For short-range communication, such as the contactless transmission of data to a base station, we have implemented an optical solution. This frontend transmits data by means of light in a cone shape with a radiation angle of about 110°. We have already been able to achieve data rates of around 300 kbit/s and are continuously working on increasing these.
| Data Rate | 300 kbit/s (an increase up to 4 Mbit/s is in progress) |
| Range | 0,7 m (an extension up to 2 m is in progress) |
Power Consumption | 10W (Broadcasting Operation) |
| Dimension | 150x100x50 (planned) |
Acoustic Communication
Most acoustic communication methods are designed for long ranges in the range of kilometers and therefore only achieve low data rates. In the BOSS project, we are evaluating acoustic communication for medium distances (< 100 m) and optimized data rates. For this purpose, we have developed a front-end for operation with broadband transducers.
| Data Rate | 150 kbit/s (planned) |
| Range | 100 m |
Power Consumption | 20W (Broadcasting Operation) |
| Dimension | 150x100x50 (planned) |
Project partner | Founded by | |
| Bundesministerium für Wirtschaft und Energie
| |
| ||