m:flo
Multiple Frequency Bands for Localization
| Duration: | 01.01.2014 - 30.08.2016 |
| Project Leader: | Prof. Dr.-Ing. Horst Hellbrück |
| Staff: | Dr.-Ing. Mathias Pelka |
Motivation
High accuracy and reliability in localization is achieved by means of radio time-of-flight measurement (see GPS). Short data packets are transmitted in the microwave range and the time until arrival at the receiver is determined. The distance is calculated using the known propagation speed (speed of light). To achieve a resolution of 30cm, a time synchronization with an accuracy of 1ns is necessary. The requirements for the time synchronization are therefore very high.
Precision and reliability for localization can be achieved using time of arrival measurements. This method uses short data packets at microwave frequencies. It is possible to calculate the current position using the known speed of light constant. To achieve a spatial resolution in the domain of one food, synchronization should be in the domain of one nano second.
Objective
It is desired to develop a system to measure the spatial coordinates of an object. Depending on the size and other parameters of the facilities the system will choose out of three available frequency ranges. Those ranges are 900 MHz, 2.4 GHz and 5.8 GHz. It is desired to use consumer of the shelf products. The radio chips and the antenna should be replaceable via breakout boards. Using that technique, it is possible to reduce the required amount of time to deploy the system.
Approach
The purpose of this R&D project is to use common radio chips which are capable of using multiple frequency bands. Those chips will be used to achieve very precise spatial measurement. Using standardization techniques it should be possible to find at least two radio chips, which are out of one chip family. This will help reduce cost and will save development time.
Results
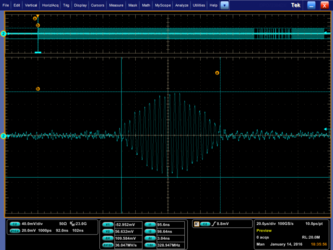
Fig.1: UWB pulse in time representation.
During the m:flo project a number positioning technologies have been evaluated and tested. For instance, we investigated CSS-based and UWB-based commercial positioning system. We evaluate such positioning systems and distance measurement systems with our tools. For instance, we are able to measure waveforms with our precise 20 GHz Oscilloscope. Such measurements are useful to detect distortions of UWB signals.
When investigating positioning data (for instance, ranging data), a visualization helps to keep track of tags and to get an idea of the quality of a position. We can test algorithms and evaluate the performance with such a system. We get immediately feedback from the system.
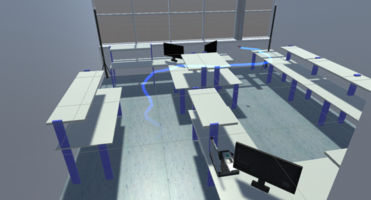
Fig.2: 3D visualization of UWB measurement data in the laboratory.
This shows a positioning system in our lab. The position of the tag is shown with the blue line
For this positioning system a self-developed time-based UWB system is employed. This system features high update rates (> 200 Hz), high accuracy (<0.3m) and high scalability (over 50 tags at the same instance of time).
Project partner | Founded by | |
| Solcon Systemtechnik GmbH | Bundesministerium für Wirtschaft und Energie Förderkennzeichen: KF3177201ED3 | |
 |   | |