RosiE
Robust and Safety-relevant Real-Time Localization
| Duration: | 01.06.2016 - 31.10.2018 |
| Project Leader: | Prof. Dr.-Ing. Horst Hellbrück |
| Staff: | Manfred Constapel, M.Sc., Dipl.-Ing. (FH) Tim Esemann, Marco Cimdins, M.Sc., Dr.-Ing. Mathias Pelka |
Background
Applications which employ autonomous industrial robots, are a possible safety hazard to humans. Robots operate in such safety zones and it is important to surveillance such areas in order to keep humans and machines safe. However, if a human enters a safety relevant zone, it is beneficial to detect this movement and to take appropriate actions.
Objective
In this project we aim to develop a robust and safety-relevant real-time localization system. For this, we investigate new kinds of device free passive localization systems to detect reliable human movement in safety-relevant areas.
Approach
The method used should be able to track objects in the security area and detect and report entry into a restricted area. A passive localization system is used for access control into the security area, while an anchor / tag based localization is used for the security and restricted area.
Primilinary results of device-based positioning
In order to make localization systems more robust, we investigate different approaches for localization, including Bluetooth-based fingerprinting or (multi)-lateration-based on distance estimation as well as hyperbolic lateration. Generally, the performance of the localization system increases, the more measurements are available. Such measurements are obtained with fixed reference points which location is known for advances. For each measurement, a reference point is required. Reference points increase the complexity of the localization system.
Our approach in this research project is to decrease the number of the required reference points, but maintain the accuracy and precision of the system. This is possible by integrating multiple antennas into a single reference point. Those antennas serve as virtual reference points. This approach decreases the complexity and costs of a localization system but maintains the accuracy and precision.
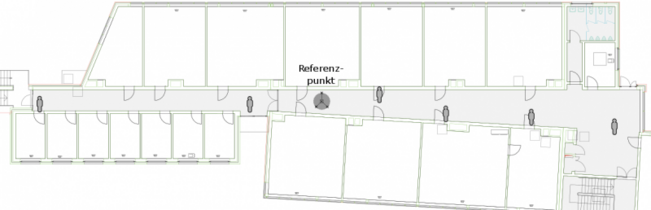
Fig.1: Building geometry using the example of a corridor of the TH Lübeck.
This puts high demands on the remaining hardware because the distance measurements towards each antenna should be as precise as possible. If the measurement error of the distance estimation is in the magnitude of the length of antenna geometry, reliable position estimation is not feasible. A remedy for this problem is to employ advanced filtering techniques which correct and refines impure distance measurements. Using advanced signal processing, we can address this issue and still provide reliable position estimation, thus decreasing the complexity and costs of a localization system but still maintain the accuracy and precision.
Evaluation of time-based distance estimation techniques
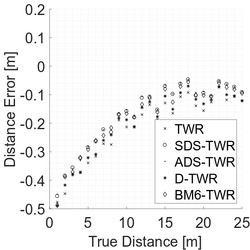
Fig.2: Systematic error for the Euclidean distance between true and measured distance.
In an additional investigation, we evaluate different techniques for Two-Way Ranging. Each technique has other properties, including the number of messages, clock drift, and runtime. Additionally, we investigate the difference between free-space distance estimation and distance estimation in closed buildings, like they occur in indoor environments.
The following figure shows the distance estimation error versus the true distance for several ranging techniques.
The systematic error present in the measurements is attributed towards clock drift and other effects. Using advanced filtering techniques to suppress the systematic error, we are able to correct the distance estimation to provide reliable and robust position estimation.
Primilinary results of device-free positioning
The goal of device-free localization systems is the detection and localization of persons that do not carry any devices. When a person is moving within a target area, the signal strength is changed due to changes in the radio frequency propagation. During a training phase, where the target area is vacant from persons, the signal strength is measured, and a threshold is determined.
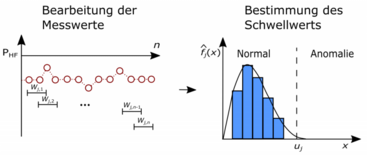
Fig.3: Determining the threshold value based on previously measured signal strengths.
When this threshold is exceeded during an online phase, a person is detected. The person can be localized by the use of non-linear filters.
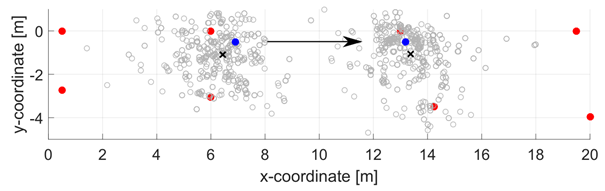
The following figure shows a corridor which is supervised by a device-free localization system consisting of 8 sensors (red dots). The blue dot indicates the ground truth position of the person and the black cross the estimated position of the system. Gray circles, so-called particles, are intermediate calculations/samples for the localization algorithm. Ideally, the particles follow the movement of the person and enable precise positioning.
Another important step for the development of a device-free localization system is the understanding of the radio frequency propagation while a person stands at a certain position. We model the impact of the persons via knife-edge diffraction. The following figure shows a person moving through the middle of a radio frequency transmission.
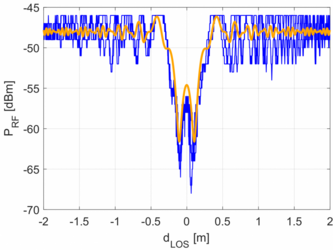
Fig.5: Measurements of radio propagation in the presence and absence of a person.
Another important step for the development of a device-free localization system is the understanding of the radio frequency propagation while a person stands at a certain position. We model the impact of the persons via knife-edge diffraction. The following figure shows a person moving through the middle of a radio frequency transmission. (Fig.5).
The blue curve are measurements, the orange curve is the result of the simulation.
Project partner | Founded by | |
| Bundesministerium für Wirtschaft und Energie Förderkennzeichen: ZF4186102ED6 | ||
 |   | |